





















Capture Timing Differences and Transient Deformation in Robotic Arm Suction Nozzles with a SH2 Series High-Speed Camera
This article explains how the SinceVision SH2 high-speed camera captures microsecond-level timing differences and transient elastic deformation in robotic arm suction nozzles, revealing hidden dynamics that affect placement accuracy and yield.





In precision automated production, robotic arms often rely on multiple suction nozzles working together at high speed. These nozzles pick and place components or materials in fractions of a second. While the motion appears smooth to the naked eye, hidden microsecond-level timing differences and transient elastic deformations can directly affect product quality. When one nozzle hesitates or a nozzle tip bends momentarily during release, the result can be misalignment, inconsistent placement, or even part damage. Identifying and measuring these high-speed events is the first step toward tighter process control and higher yield.
Why ordinary cameras fall short
Standard machine vision cameras operate at 30 or 60 frames per second. A robotic arm cycle that completes in 200 milliseconds would be captured in only a handful of frames, with critical transitions lost between exposures. The timing difference between nozzles in a four-nozzle system may be just a few milliseconds. Transient tip deflection may last less than 5 milliseconds. Seeing these events clearly requires frame rates of one thousand per second or more, combined with high resolution so that subtle displacements in the sub-millimeter range remain visible.
This is where a dedicated high-speed camera for robotic arm timing analysis becomes essential. The SinceVision SH2 Series high-speed camera provides exactly these capabilities, making it a practical tool for production engineers and process developers who need to see what conventional inspection misses.
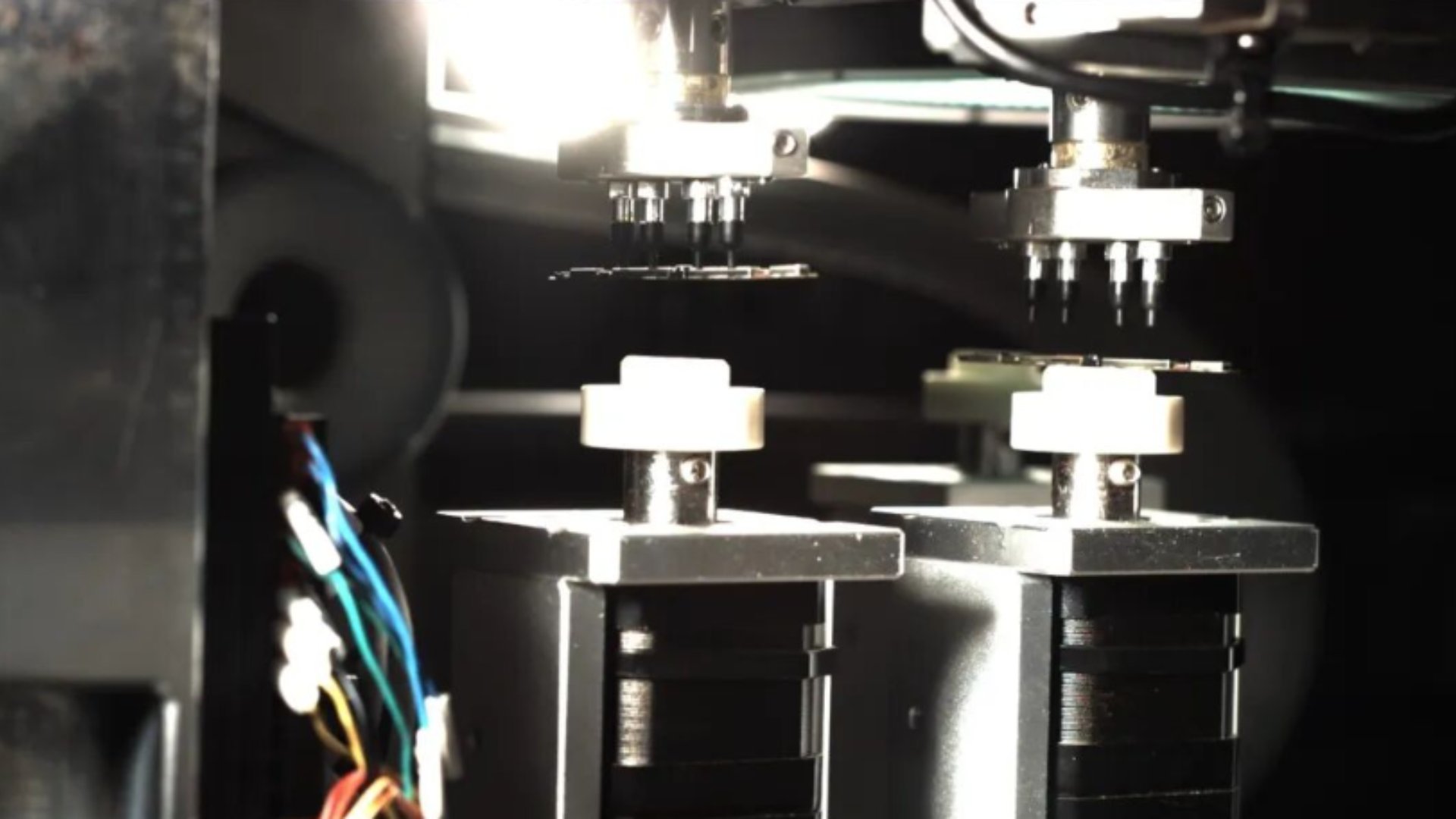
The application: suction nozzle timing differences
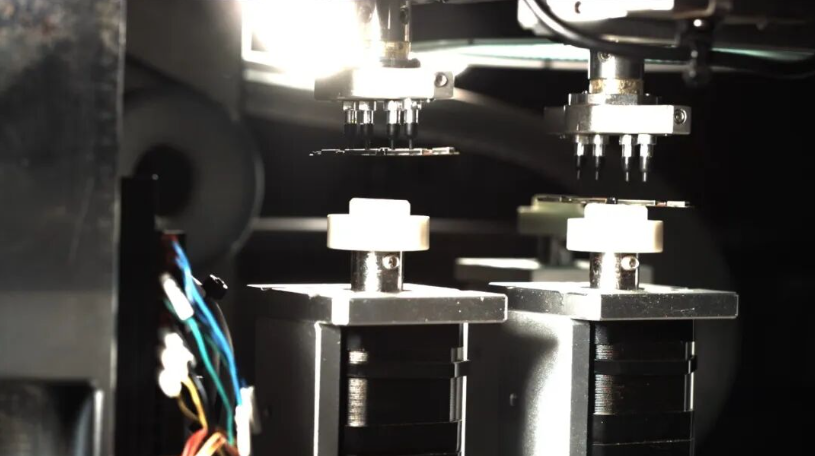
Consider a typical pick-and-place station with four suction nozzles mounted on a single head. The control system commands all nozzles to grip parts simultaneously, but in reality, response delays in pneumatic valves, slight variations in vacuum pressure, and mechanical differences cause asynchronous tensile loading. One nozzle may exert force a few milliseconds before the others, pulling the part slightly out of alignment. This asynchrony is invisible to the human eye and too brief for a standard camera, yet it directly influences placement accuracy and cycle consistency.
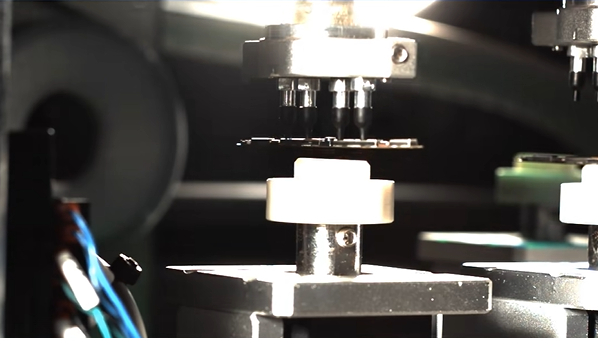
With a SH2 high-speed camera operating at 1000 frames per second at full 1920×1080 resolution, every phase of the nozzle movement is recorded. The video sequence reveals not only which nozzle activates first but also the precise order and timing of all four. This visual evidence allows process engineers to adjust valve timing, equalize vacuum lines, or modify control algorithms. Instead of guessing or relying on aggregate statistical data, they see exactly what happens on each cycle.
Transient deformation at the nozzle tip
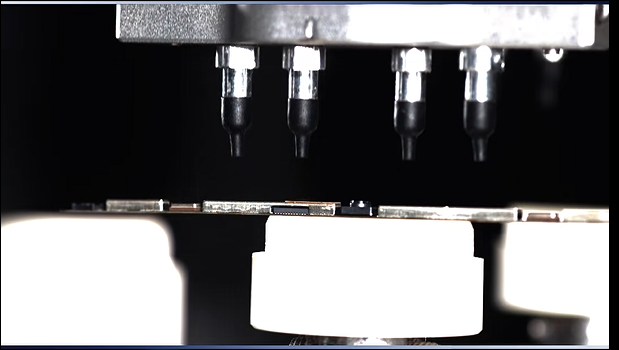
Another subtle phenomenon that impacts precision assembly is transient elastic deformation at the nozzle tip. When a part is released, the sudden removal of load can cause the flexible nozzle tip to spring downward momentarily. This transient deformation inspection suction nozzle application reveals whether the tip contacts or disturbs the placed part or nearby components. That brief deflection, lasting only a few milliseconds, can go completely unnoticed in a production environment yet lead to scratches, component displacement, or inconsistent adhesive application.
By recording at 1,000 fps with a short exposure time, the SinceVision SH2 camera freezes this motion. The resulting video, played back at reduced speed, shows the exact magnitude and duration of the tip deflection. Engineers can measure how far the tip travels and how long it takes to return to its neutral position. With hard numbers, they can select stiffer nozzle materials, adjust release timing, or modify the trajectory to eliminate unwanted contact.
Quantitative data from SinceVision motion analysis software
High-frame-rate video alone is powerful, but the real value emerges when qualitative observation turns into quantitative measurement. SinceVision includes self-developed motion analysis software that tracks features on the nozzle and the part across the entire recorded sequence. The software measures nozzle displacement in pixels, converts it to metric units using calibration, and plots position versus time. From these plots, engineers extract velocity, acceleration, and timing offsets between multiple nozzles.
This data becomes the foundation for robotic arm nozzle synchronization decisions. For example, if the timing offset between the earliest and latest nozzle is found to be 4.2 milliseconds, the control system can be reprogrammed to compensate. If the tip deflection during part release measures 0.15 mm and the clearance to the next component is only 0.2 mm, a design change is clearly warranted. Without quantitative data, process improvements rely on trial and error. With it, changes are targeted and verified.
A camera built for demanding environments
The SinceVision SH2 Series is designed as a compact, high-performance solution for specialized scientific and industrial research. Its 150-nanosecond dual-exposure capability makes it particularly useful for techniques such as Particle Image Velocimetry (PIV), where tracking fast-moving fluid particles requires precisely timed short bursts of illumination. A minimum exposure of 100 nanoseconds and a frame rate of up to 3,200 fps at reduced resolution extend its usability to even faster applications. For robotic arm analysis at 1,000 fps with full HD resolution, the camera offers amply detailed imaging.
Large onboard memory ensures that multiple complete operation cycles are stored without interruption, enabling side-by-side comparison of good and defective cycles. The camera integrates easily into production lines or laboratory setups without complex infrastructure.
Impact on production
With the ability to visualize and measure timing differences and transient deformation, manufacturers achieve measurable improvements. Cycle time optimization becomes evidence-based, as engineers can safely reduce delays without risking collisions. Pick-and-place accuracy improves when synchronous gripping is confirmed and verified. Yield increases when transient tip contact is eliminated, reducing rejected parts and rework.
Moreover, the same high-speed camera serves multiple purposes. Once installed, the camera can be used for troubleshooting other dynamic processes, such as ejector pin movements, ultrasonic welding vibrations, or fluid dispensing patterns. It becomes a shared resource for continuous process insight.
Experience SH2 Series yourself
Your pursuit of deeper process understanding aligns with what our technology is built to deliver. We invite you to apply for a free sample test. Experience directly how high-speed imaging can reveal the hidden dynamics of your robotic arm operations and provide the quantitative answers you need for confident process optimization. Contact us today to arrange a trial, and let clear vision drive your journey toward smarter manufacturing.
Research Published in Nature Communications: SinceVision Camera Validates New Neuromorphic Imaging Array

You can also read
Observation of Embryonic Fibroblasts with sCMOS Camera for Multichannel Imaging
Jun 23, 2026
Automating Automotive Body Gap Detection with the SinceVision SR8060H 3D Laser Profiler
Jun 05, 2026
Curved Lens Inspection: How the Spectral Confocal Sensor Solves the Three Biggest Challenges
Jun 03, 2026
How Automotive Manufacturers Can Accurately Measure Conformal Coating Thickness on PCBA
Apr 29, 2026
Capture Timing Differences and Transient Deformation in Robotic Arm Suction Nozzles with a SH2 Series High-Speed Camera
Apr 28, 2026





 Compare
Compare Clear the comparison bar
Clear the comparison bar
